Tutorial about tracking LocData objects¶
Tracking refers to link localizations that are close in space over multiple frames and collect those localizations in individual tracks. We here make use of the trackpy package through wrapper functions to deal with LocData objects.
%matplotlib inline
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import locan as lc
lc.show_versions(system=False, dependencies=False, verbose=False)
Locan:
version: 0.22.0.dev32+g4bfc3ab8b
Python:
version: 3.11.14
Synthetic data¶
A random dataset is created.
dat = lc.simulate_tracks(n_walks=5, n_steps=100, ranges=((0,1000),(0,1000)),
diffusion_constant=1, seed=1)
dat.print_meta()
Jupyter environment detected. Enabling Open3D WebVisualizer.
[Open3D INFO] WebRTC GUI backend enabled.
[Open3D INFO] WebRTCWindowSystem: HTTP handshake server disabled.
identifier: "1"
source: SIMULATION
state: RAW
history {
name: "simulate_tracks"
parameter: "{\'n_walks\': 5, \'n_steps\': 100, \'ranges\': ((0, 1000), (0, 1000)), \'diffusion_constant\': 1, \'time_step\': 10, \'seed\': 1}"
}
element_count: 500
frame_count: 100
creation_time {
2026-04-30T08:38:41.872536Z
}
dat.data.head()
| position_x | position_y | frame | |
|---|---|---|---|
| 0 | 518.146180 | 429.651004 | 0 |
| 1 | 524.470735 | 435.975560 | 1 |
| 2 | 530.795291 | 429.651004 | 2 |
| 3 | 524.470735 | 435.975560 | 3 |
| 4 | 518.146180 | 429.651004 | 4 |
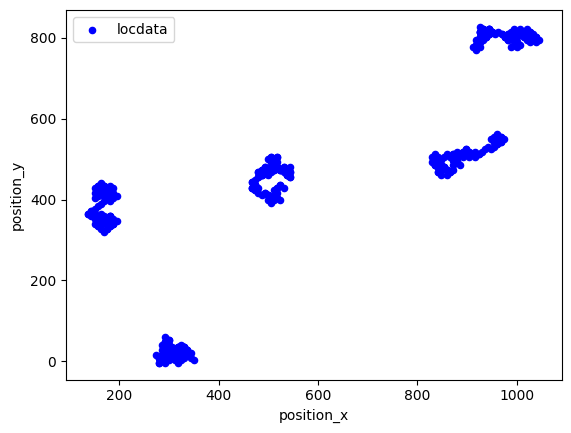
fig, ax = plt.subplots(nrows=1, ncols=1)
dat.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Blue', label='locdata')
plt.show()
Track locdata¶
The track function collects tracks in a new locdata object.
tracks, track_numbers = lc.track(dat, search_range=500)
Frame 99: 5 trajectories present.
tracks.print_summary()
identifier: "7"
comment: ""
source: DESIGN
state: RAW
element_count: 5
frame_count: 1
creation_time {
2026-04-30T08:38:42.201640Z
}
tracks.data
| localization_count | position_x | uncertainty_x | position_y | uncertainty_y | frame | region_measure_bb | localization_density_bb | subregion_measure_bb | |
|---|---|---|---|---|---|---|---|---|---|
| 0 | 100 | 505.497069 | 2.098581 | 456.720101 | 3.047211 | 0 | 8640.0 | 0.011574 | 379.473319 |
| 1 | 100 | 972.599640 | 3.900272 | 805.187177 | 1.217117 | 0 | 7560.0 | 0.013228 | 379.473319 |
| 2 | 100 | 169.710816 | 1.293090 | 381.371093 | 3.679042 | 0 | 6840.0 | 0.014620 | 354.175098 |
| 3 | 100 | 882.368107 | 4.321878 | 504.562854 | 2.382224 | 0 | 14720.0 | 0.006793 | 493.315315 |
| 4 | 100 | 307.151281 | 1.787996 | 19.463682 | 1.378273 | 0 | 4800.0 | 0.020833 | 278.280434 |
tracks.references[0].data.head()
| position_x | position_y | frame | |
|---|---|---|---|
| 0 | 518.146180 | 429.651004 | 0 |
| 1 | 524.470735 | 435.975560 | 1 |
| 2 | 530.795291 | 429.651004 | 2 |
| 3 | 524.470735 | 435.975560 | 3 |
| 4 | 518.146180 | 429.651004 | 4 |
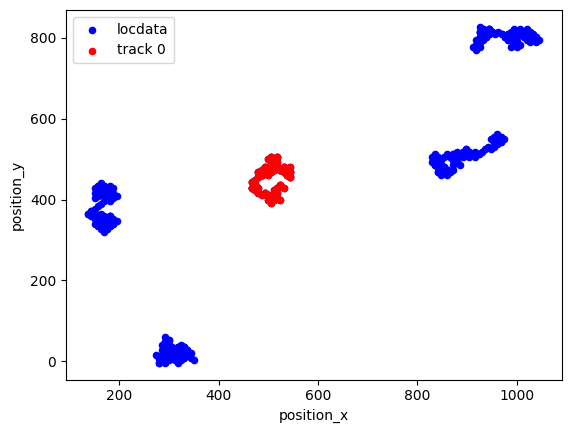
fig, ax = plt.subplots(nrows=1, ncols=1)
dat.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Blue', label='locdata')
tracks.references[0].data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Red', label='track 0')
plt.show()
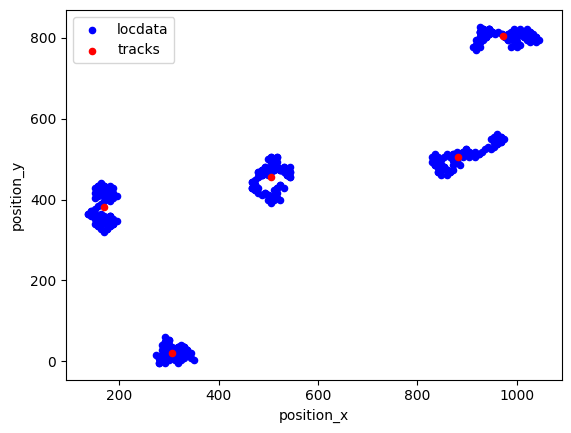
fig, ax = plt.subplots(nrows=1, ncols=1)
dat.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Blue', label='locdata')
tracks.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Red', label='tracks')
plt.show()
To show individual tracks make use of the reference attribute.
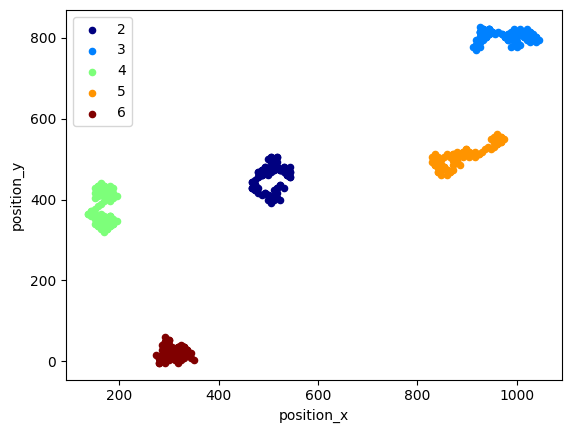
fig, ax = plt.subplots(nrows=1, ncols=1)
jet= plt.get_cmap('jet')
colors = iter(jet(np.linspace(0, 1, len(tracks))))
for ref in tracks.references:
c=next(colors)
ref.data.plot.scatter(x='position_x', y='position_y', ax=ax, color=(c,), label=ref.meta.identifier)
plt.show()
Alternatively to a new locdata object, a pandas DataFrame can be generated using the link_locdata method.
links = lc.link_locdata(dat, search_range=10)
Frame 99: 5 trajectories present.
links.head()
0 0
100 1
200 2
300 3
400 4
Name: track, dtype: int64
Use the following to add particle column to original locdata dataset.
dat.data.loc[links.index,'track']=links
dat.data.head()
| position_x | position_y | frame | track | |
|---|---|---|---|---|
| 0 | 518.146180 | 429.651004 | 0 | 0.0 |
| 1 | 524.470735 | 435.975560 | 1 | 0.0 |
| 2 | 530.795291 | 429.651004 | 2 | 0.0 |
| 3 | 524.470735 | 435.975560 | 3 | 0.0 |
| 4 | 518.146180 | 429.651004 | 4 | 0.0 |
Track using trackpy with locdata.data as input¶
For a detailed tracking analysis you might want to use trackpy functions with the pandas DataFrame carrying localization data as input. The following examples will igve a short illustration of using trackpy functions.
import trackpy as tp
t = tp.link_df(dat.data, search_range=100, memory=1, pos_columns=['position_x', 'position_y'], t_column='frame')
t.head(10)
Frame 99: 5 trajectories present.
| position_x | position_y | frame | track | particle | |
|---|---|---|---|---|---|
| 0 | 518.146180 | 429.651004 | 0 | 0.0 | 0 |
| 100 | 944.139141 | 821.378039 | 0 | 1.0 | 1 |
| 200 | 150.484168 | 402.874581 | 0 | 2.0 | 2 |
| 300 | 954.974002 | 543.269132 | 0 | 3.0 | 3 |
| 400 | 318.156007 | 33.883669 | 0 | 4.0 | 4 |
| 301 | 961.298558 | 549.593688 | 1 | 3.0 | 3 |
| 101 | 937.814586 | 815.053483 | 1 | 1.0 | 1 |
| 201 | 156.808723 | 409.199136 | 1 | 2.0 | 2 |
| 401 | 324.480563 | 27.559113 | 1 | 4.0 | 4 |
| 1 | 524.470735 | 435.975560 | 1 | 0.0 | 0 |
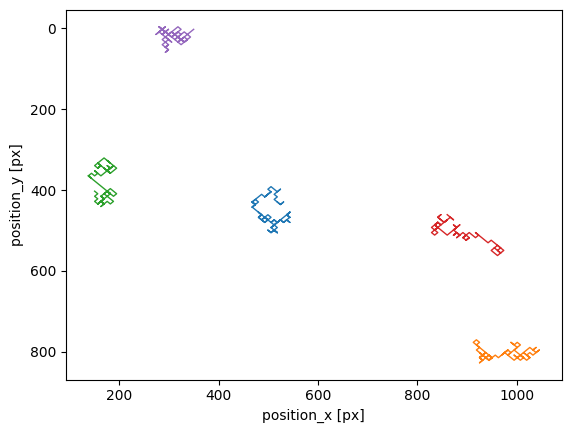
plt.figure()
tp.plot_traj(t, pos_columns=['position_x', 'position_y'], t_column='frame');
filter¶
t.head()
| position_x | position_y | frame | track | particle | |
|---|---|---|---|---|---|
| 0 | 518.146180 | 429.651004 | 0 | 0.0 | 0 |
| 100 | 944.139141 | 821.378039 | 0 | 1.0 | 1 |
| 200 | 150.484168 | 402.874581 | 0 | 2.0 | 2 |
| 300 | 954.974002 | 543.269132 | 0 | 3.0 | 3 |
| 400 | 318.156007 | 33.883669 | 0 | 4.0 | 4 |
t1 = tp.filter_stubs(t, 10).reset_index(drop=True)
len(t1)
500
plt.figure()
tp.plot_traj(t1, pos_columns=['position_x', 'position_y']);
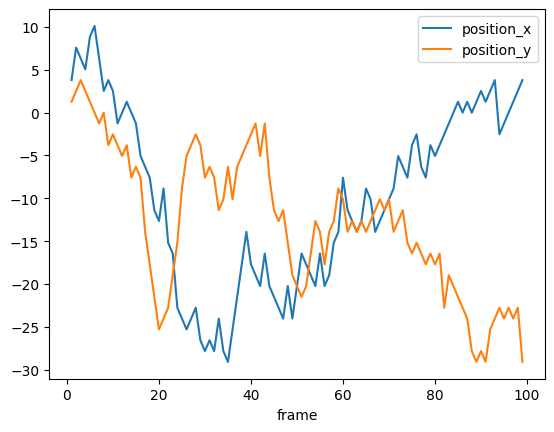
drift¶
d = tp.compute_drift(t1, pos_columns=['position_x', 'position_y'])
d.plot()
plt.show()
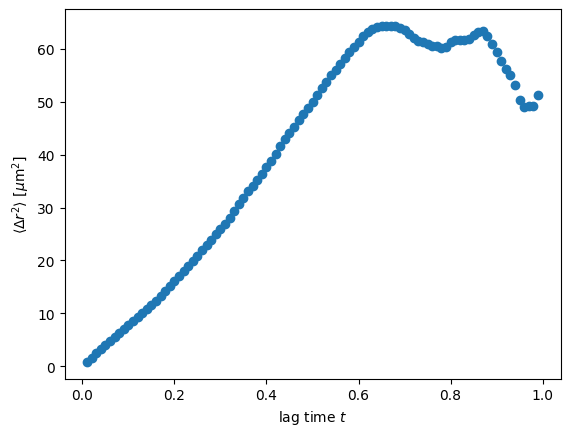
Mean square displacement (msd)¶
em = tp.emsd(t1,0.1, 100, pos_columns=['position_x', 'position_y']) # microns per pixel = 100/285., frames per second = 24
fig, ax = plt.subplots()
ax.plot(em.index, em, 'o')
#ax.set_xscale('log')
#ax.set_yscale('log')
ax.set(ylabel=r'$\langle \Delta r^2 \rangle$ [$\mu$m$^2$]',
xlabel='lag time $t$')
#ax.set(ylim=(1e-2, 10));
[Text(0, 0.5, '$\\langle \\Delta r^2 \\rangle$ [$\\mu$m$^2$]'),
Text(0.5, 0, 'lag time $t$')]