Tutorial about how to use a standard Analysis class¶
from pathlib import Path
%matplotlib inline
import matplotlib.pyplot as plt
import locan as lc
lc.show_versions(system=False, dependencies=False, verbose=False)
Locan:
version: 0.22.0.dev32+g4bfc3ab8b
Python:
version: 3.11.14
# A path in which test data can be found:
TEST_DIR: Path = Path.cwd().parents[2] / "tests"
TEST_DIR
PosixPath('/home/docs/checkouts/readthedocs.org/user_builds/locan/checkouts/latest/tests')
Load SMLM data file¶
Identify some data in the test_data directory and provide a path using pathlib.Path
path = TEST_DIR / 'test_data/npc_gp210.asdf'
print(path, '\n')
dat = lc.load_locdata(path=path, file_type=lc.FileType.ASDF)
/home/docs/checkouts/readthedocs.org/user_builds/locan/checkouts/latest/tests/test_data/npc_gp210.asdf
Jupyter environment detected. Enabling Open3D WebVisualizer.
[Open3D INFO] WebRTC GUI backend enabled.
[Open3D INFO] WebRTCWindowSystem: HTTP handshake server disabled.
print(dat.data.head(), '\n')
print('Summary:')
dat.print_summary()
print('Properties:')
print(dat.properties)
position_x position_y frame intensity two_kernel_improvement \
0 5631.709961 6555.850098 24 21800.699219 0.0
1 5642.899902 6550.990234 25 23352.900391 0.0
2 5610.319824 6546.819824 26 5007.509766 0.0
3 5713.299805 6611.950195 141 6437.140137 0.0
4 5699.750000 6627.390137 142 19998.300781 0.0
chi_square local_background
0 1426930.0 1188.489990
1 983634.0 1135.199951
2 577707.0 1107.219971
3 616255.0 1118.430054
4 903412.0 1144.709961
Summary:
identifier: "5"
comment: ""
source: EXPERIMENT
state: MODIFIED
element_count: 202
frame_count: 202
file {
type: ASDF
path: "/home/docs/checkouts/readthedocs.org/user_builds/locan/checkouts/latest/tests/test_data/npc_gp210.asdf"
}
creation_time {
2024-01-23T08:32:31.518779Z
}
modification_time {
2024-01-23T08:32:31.518779Z
}
Properties:
{'localization_count': 202, 'position_x': np.float64(5623.488892810179), 'uncertainty_x': np.float64(3.9700846636030356), 'position_y': np.float64(6625.534602703435), 'uncertainty_y': np.float64(3.999303432482808), 'intensity': np.float32(3944778.0), 'local_background': np.float32(1131.3207), 'frame': np.int16(24), 'region_measure_bb': np.float32(47134.543), 'localization_density_bb': np.float32(0.004285604), 'subregion_measure_bb': np.float32(870.98047)}
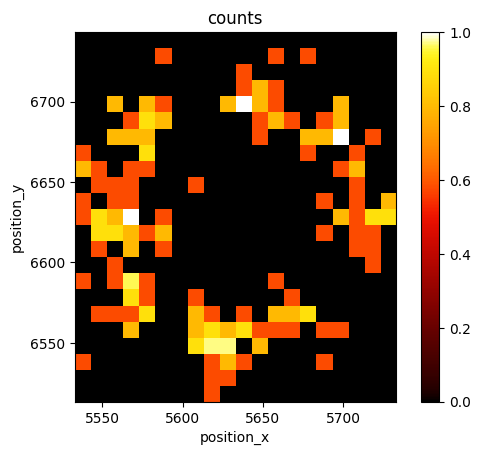
Visualization¶
For visualizing the data use one of the rendering methods.
lc.render_2d_mpl(dat, bin_size=10, rescale=lc.Trafo.EQUALIZE);
A simple analysis procedure: localization precision¶
Instantiation¶
Create an instance of the analysis class. By doing this you set all parameters in the parameter attribute. To start the actual computation you have to call instance.compute().
lp = lc.LocalizationPrecision(radius=50)
Each analysis class provides some attributes and methods for the most common interactions with the computed results.
attributes = [x for x in dir(lp) if not x.startswith('_')]
attributes
['compute',
'count',
'distribution_statistics',
'fit_distributions',
'hist',
'meta',
'parameter',
'plot',
'report',
'results']
The results attribute¶
A standard analysis class has an attribute results to hold the most fundamental results as number, numpy array or pandas series or dataframe.
lp.compute(dat)
print('type of lpf.results: ', type(lp.results), '\n')
print(lp.results.head())
Processed frames:: 0%| | 0/24884 [00:00<?, ?it/s]
Processed frames:: 0%| | 1/24884 [00:00<56:23, 7.36it/s]
Processed frames:: 16%|█▌ | 3906/24884 [00:00<00:01, 19663.80it/s]
Processed frames:: 29%|██▉ | 7266/24884 [00:00<00:00, 25235.78it/s]
Processed frames:: 69%|██████▉ | 17286/24884 [00:00<00:00, 52753.34it/s]
Processed frames:: 100%|██████████| 24884/24884 [00:00<00:00, 50701.69it/s]
type of lpf.results: <class 'pandas.core.frame.DataFrame'>
position_delta_x position_delta_y position_distance original_index \
0 -11.189941 4.859863 12.199716 0
1 32.580078 4.170410 32.845909 1
2 13.549805 -15.439941 20.542370 3
3 4.669922 3.010254 5.556060 4
4 20.469727 14.750000 25.230383 6
frame
0 24
1 25
2 141
3 142
4 239
Results can be saved by specifying a path
from pathlib import Path
temp_directory = Path('.') / 'temp'
temp_directory.mkdir(parents=True, exist_ok=True)
path = temp_directory / 'results.txt'
path
PosixPath('temp/results.txt')
and saving the data using numpy or pandas routines
lp.results.to_csv(path, sep='\t')
Delete the file and empty directory
path.unlink()
temp_directory.rmdir()
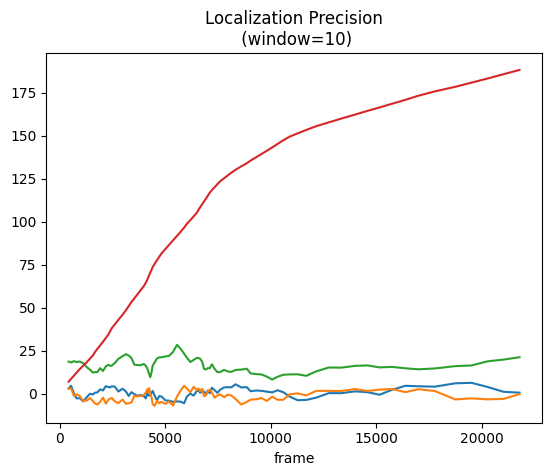
A simple standardized plot¶
Most likely the results should be inspected by looking at a typical plot. In this case the plot shows results smoothed by a running average according to the specified window.
lp.plot(window=10);
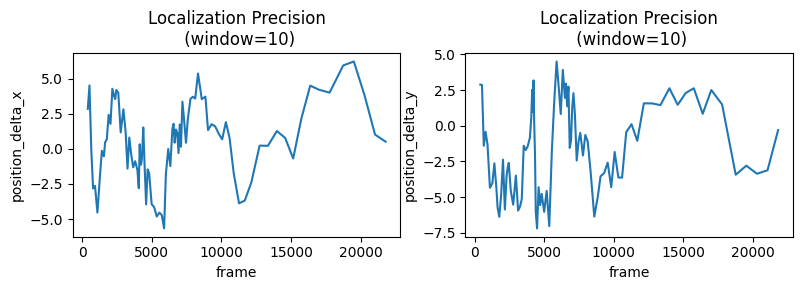
For more advanced plotting schemes use the matplotlip framework.
fig, ax = plt.subplots(nrows=1, ncols=2, figsize=(8,3))
lp.plot(ax=ax[0], window=10, loc_property='position_delta_x')
lp.plot(ax=ax[1], window=10, loc_property='position_delta_y')
plt.tight_layout()
plt.show()
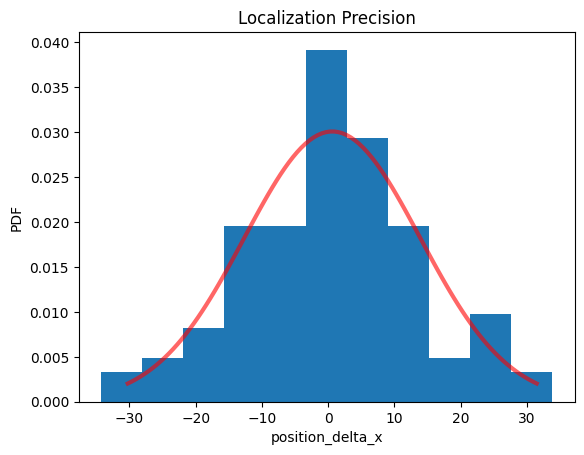
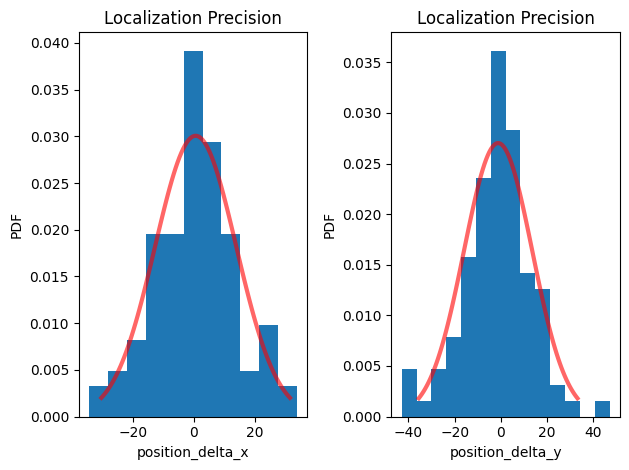
A simple standardized histogram¶
Quite often the results are best presented as a histogram. The histogram for the distances per default includes a fit to a distribution expected for normal distributed localizations. Sigma is the localization precision.
The histogram per default provides automatic bins and is normalized to show a probability density function.
lp.hist(loc_property='position_delta_x');
Alternatively the position deltas can be histogrammed.
fig, ax = plt.subplots(nrows=1, ncols=2)
lp.hist(ax=ax[0], loc_property='position_delta_x')
lp.hist(ax=ax[1], loc_property='position_delta_y')
plt.tight_layout()
plt.show()
Secondary results¶
Secondary results are e.g. fit parameter derived from analyzing the distribution of results values. Secondary results are different for each analysis routine. They are included as additional attributes.
Localization precision can e.g. be derived from fitting the position distances to an appropriate distribution and estimating the sigma parameter.
lp.distribution_statistics.parameter_dict()
{'position_delta_x_loc': np.float32(0.6029139),
'position_delta_x_scale': np.float32(13.2682),
'position_delta_y_loc': np.float32(-1.227687),
'position_delta_y_scale': np.float32(14.76087),
'position_distance_sigma': np.float64(14.067675781250028),
'position_distance_loc': 0,
'position_distance_scale': 1}
print('position_distance_sigma: ', lp.distribution_statistics.parameter_dict()['position_distance_sigma'])
position_distance_sigma: 14.067675781250028
Metadata¶
Each analysis class is supplied with meta data. The main purpose is to (i) capture methods and parameters that were supplied in each instantiation and (ii) provide information on the dataset on which the particular analysis was carried out. Metadata is structured using protocol buffers.
lp.meta
identifier: "1"
method {
name: "LocalizationPrecision"
parameter: "{\'radius\': 50}"
}
creation_time {
seconds: 1777538078
nanos: 626496000
}
You can add some user-defined key-value pairs:
lp.meta.map['some key'] = 'some value'
lp.meta.map
{'some key': 'some value'}
Metadata can be used to rerun the analysis with the same parameter.¶
lp.meta.method.name
'LocalizationPrecision'
lp.meta.method.parameter
"{'radius': 50}"
import ast
import locan.analysis
params = ast.literal_eval(lp.meta.method.parameter)
print(params)
lp_2 = getattr(locan.analysis, lp.meta.method.name)(**params)
lp_2.compute(dat)
lp_2.results.head()
{'radius': 50}
Processed frames:: 0%| | 0/24884 [00:00<?, ?it/s]
Processed frames:: 16%|█▌ | 3905/24884 [00:00<00:00, 38163.35it/s]
Processed frames:: 31%|███ | 7722/24884 [00:00<00:00, 36637.62it/s]
Processed frames:: 70%|██████▉ | 17361/24884 [00:00<00:00, 62934.63it/s]
Processed frames:: 100%|██████████| 24884/24884 [00:00<00:00, 69930.64it/s]
| position_delta_x | position_delta_y | position_distance | original_index | frame | |
|---|---|---|---|---|---|
| 0 | -11.189941 | 4.859863 | 12.199716 | 0 | 24 |
| 1 | 32.580078 | 4.170410 | 32.845909 | 1 | 25 |
| 2 | 13.549805 | -15.439941 | 20.542370 | 3 | 141 |
| 3 | 4.669922 | 3.010254 | 5.556060 | 4 | 142 |
| 4 | 20.469727 | 14.750000 | 25.230383 | 6 | 239 |