Tutorial about drift analysis and correction¶
Lateral drift correction is useful in most SMLM experiments. To determine the amount of drift a method based on image cross-correlation or an iterative closest point algorithm can be applied.
We demonstrate drift analysis and correction on simulated data.
from pathlib import Path
%matplotlib inline
import numpy as np
import matplotlib.pyplot as plt
import scipy.stats as stats
import locan as lc
lc.show_versions(system=False, dependencies=False, verbose=False)
Locan:
version: 0.22.0.dev32+g4bfc3ab8b
Python:
version: 3.11.14
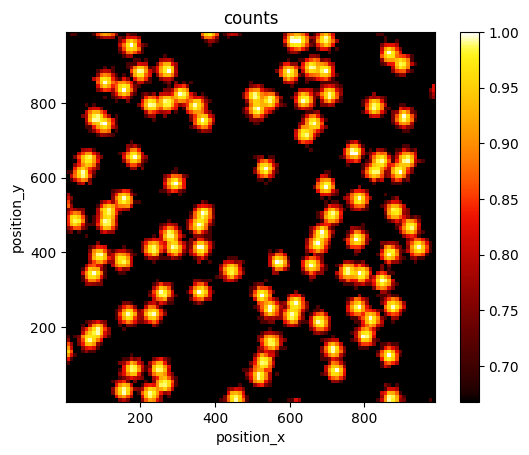
Synthetic data¶
We use synthetic data that follows a Neyman-Scott spatial distribution (blobs). The intensity values are exponentially distributed and the number of localizations per frame follows a Poisson distribution:
rng = np.random.default_rng(seed=1)
intensity_mean = 1000
localizations_per_frame_mean = 3
dat_blob = lc.simulate_Thomas(parent_intensity=1e-4, region=((0, 1000), (0, 1000)), cluster_mu=1000, cluster_std=10, seed=rng)
dat_blob.dataframe['intensity'] = stats.expon.rvs(scale=intensity_mean, size=len(dat_blob), loc=500)
dat_blob.dataframe['frame'] = lc.simulate_frame_numbers(n_samples=len(dat_blob), lam=localizations_per_frame_mean, seed=rng)
dat_blob = lc.LocData.from_dataframe(dataframe=dat_blob.data)
print('Data head:')
print(dat_blob.data.head(), '\n')
print('Summary:')
dat_blob.print_summary()
print('Properties:')
print(dat_blob.properties)
Jupyter environment detected. Enabling Open3D WebVisualizer.
[Open3D INFO] WebRTC GUI backend enabled.
[Open3D INFO] WebRTCWindowSystem: HTTP handshake server disabled.
Data head:
position_x position_y cluster_label intensity frame
0 915.763326 465.421770 28 4232.493866 0
1 729.786200 81.672520 56 929.007997 1
2 869.708004 9.266125 41 867.784458 1
3 521.743493 54.508814 14 2124.239866 2
4 430.972011 375.461311 61 2188.359508 3
Summary:
identifier: "2"
comment: ""
source: DESIGN
state: RAW
element_count: 98201
frame_count: 31016
creation_time {
2026-04-30T08:33:22.672057Z
}
Properties:
{'localization_count': 98201, 'position_x': np.float64(495.13588743804684), 'uncertainty_x': np.float64(0.8971814298938875), 'position_y': np.float64(507.65355920347866), 'uncertainty_y': np.float64(0.8964573205917536), 'intensity': np.float64(147154096.15695238), 'frame': np.int64(0), 'region_measure_bb': np.float64(999959.2361869529), 'localization_density_bb': np.float64(0.09820500321039116), 'subregion_measure_bb': np.float64(3999.918472062067)}
lc.render_2d(dat_blob, bin_size=10, rescale='equal');
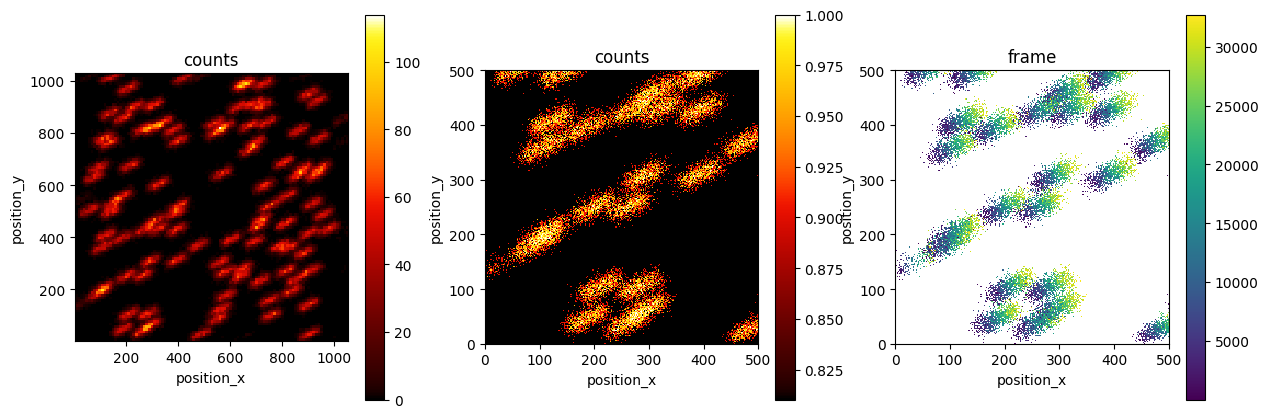
Add linear drift¶
We add linear drift with a velocity given in length units per frame.
dat_blob_with_drift = lc.add_drift(dat_blob, velocity=(0.002, 0.001), seed=rng)
fig, axes = plt.subplots(1, 3, figsize=(15, 5))
lc.render_2d(dat_blob_with_drift, ax=axes[0], bin_size=10);
lc.render_2d(dat_blob_with_drift, ax=axes[1], bin_size=2, rescale='equal', bin_range=((0, 500),(0, 500)));
lc.render_2d_mpl(dat_blob_with_drift, ax=axes[2], other_property='frame', bin_size=2, bin_range=((0, 500),(0, 500)), cmap='viridis');
Estimate RMS errors¶
Knowing the ground truth, you can define a root mean squared error between the original localization coordinates and those after drift and later after correction.
def rmse(locdata, other_locdata):
return np.sqrt(np.mean(np.square(np.subtract(locdata.coordinates, other_locdata.coordinates)), axis=0))
rmse(dat_blob, dat_blob_with_drift).round(2)
array([37.76, 18.88])
Estimate drift¶
Drift can be estimated by comparing different chunks of successive localizations using either an “iterative closest point” algorithm or a “cross-correlation” algorithm. Per default, the icp algorithm is applied.
%%time
drift = lc.Drift(chunk_size=10_000, target='first', method='icp').compute(dat_blob_with_drift)
CPU times: user 3.35 s, sys: 7.23 ms, total: 3.36 s
Wall time: 1.89 s
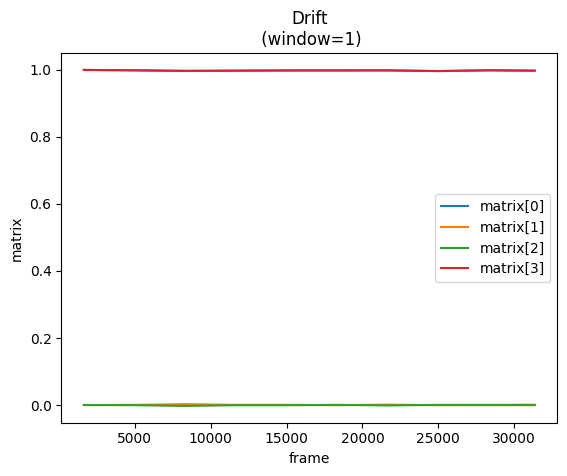
Transformations to register the different data chunks are represented by a transformation matrix and a transformation offset that together specifiy an affine transformation. The tansformation parameters are kept under the transformations attribute.
drift.transformations
[Transformation(matrix=array([[1., 0.],
[0., 1.]]), offset=array([0., 0.])),
Transformation(matrix=array([[ 9.98792443e-01, 4.43801557e-04],
[-4.43801557e-04, 9.98792443e-01]]), offset=array([-6.56553239, -2.7171172 ])),
Transformation(matrix=array([[ 0.99716405, 0.00268322],
[-0.00268322, 0.99716405]]), offset=array([-13.15345296, -4.05470652])),
Transformation(matrix=array([[ 9.97764214e-01, 5.81845172e-04],
[-5.81845172e-04, 9.97764214e-01]]), offset=array([-19.46087507, -8.60939708])),
Transformation(matrix=array([[ 9.98398817e-01, 6.25680278e-04],
[-6.25680278e-04, 9.98398817e-01]]), offset=array([-25.94756073, -12.08151622])),
Transformation(matrix=array([[ 9.98495460e-01, -4.65982241e-04],
[ 4.65982241e-04, 9.98495460e-01]]), offset=array([-32.71859007, -15.76861207])),
Transformation(matrix=array([[ 0.99857889, 0.00120287],
[-0.00120287, 0.99857889]]), offset=array([-39.95058187, -18.65026698])),
Transformation(matrix=array([[ 9.96629116e-01, -5.37378964e-04],
[ 5.37378964e-04, 9.96629116e-01]]), offset=array([-44.18251022, -22.15203275])),
Transformation(matrix=array([[ 9.98851114e-01, -4.33292180e-04],
[ 4.33292180e-04, 9.98851114e-01]]), offset=array([-52.9063275 , -26.00989829])),
Transformation(matrix=array([[ 9.97771654e-01, -6.47144209e-04],
[ 6.47144209e-04, 9.97771654e-01]]), offset=array([-58.14458854, -28.33975215]))]
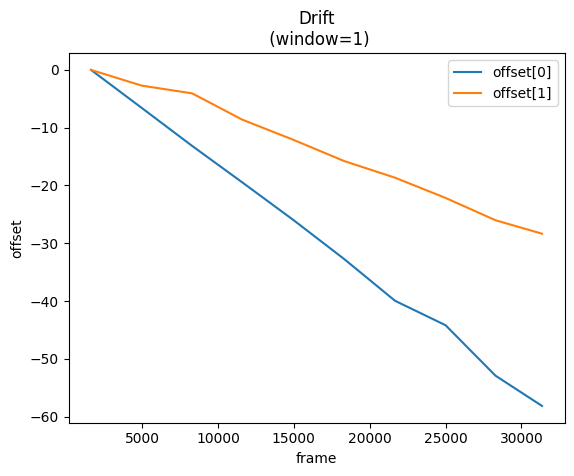
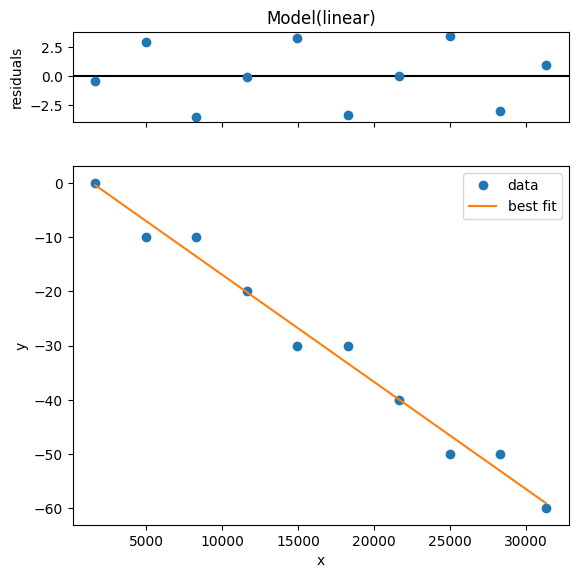
The parameters can be visualized using the plot function. The matrix in this case is close to the unit matrix.
drift.plot(transformation_component='matrix', element=None);
plt.legend();
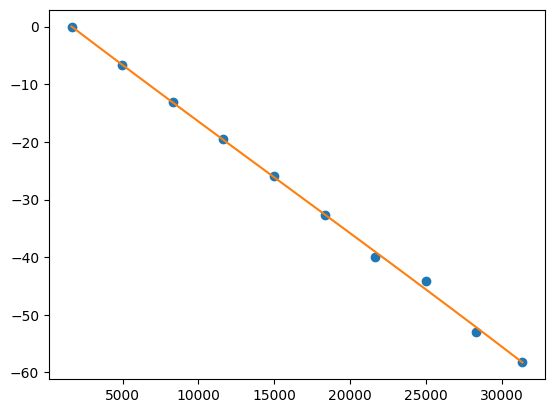
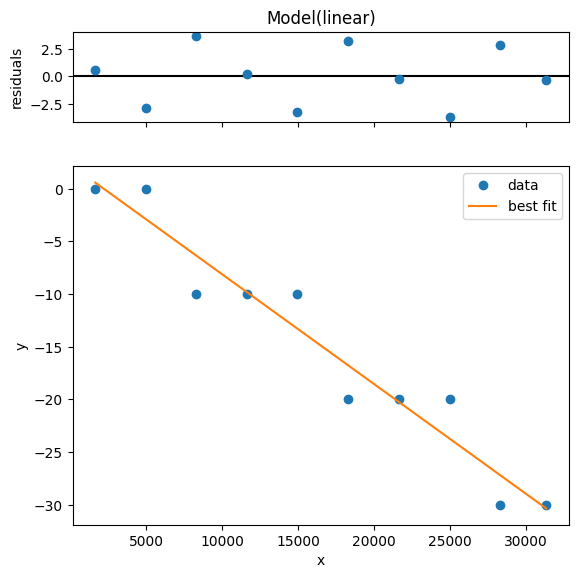
drift.plot(transformation_component='offset', element=None)
plt.legend();
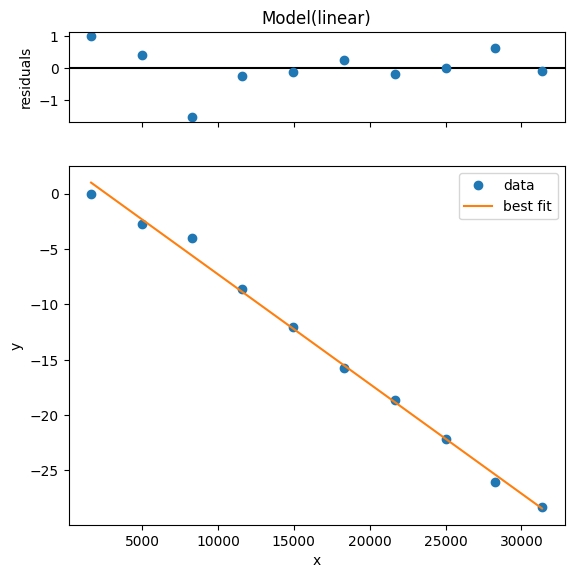
Model drift¶
A continuous transformation model as function of frame number is estimated by fitting the individual transformation components with the specified fit models. Fit models can be provided as DriftComponent or by a string representing standard model functions.
from lmfit.models import ConstantModel, LinearModel, PolynomialModel
drift.fit_transformations(slice_data=slice(None), offset_models=(lc.DriftComponent('spline', s=100), 'linear'), verbose=True);
The fit models are represented as DriftComponent and can be accessed through the transformation_models attribute.
drift.transformation_models
{'matrix': None,
'offset': [<locan.analysis.drift.DriftComponent at 0x7cdb0a972010>,
<locan.analysis.drift.DriftComponent at 0x7cdb0a7ce210>]}
drift.transformation_models['offset'][0].type
'spline'
drift.transformation_models['offset'][0].eval(0)
array(3.33056629)
Each DriftModel carries detailed information about the fit under the model_result attribute. In most cases, except splines, this will be a lmfit.ModelResult object.
drift.transformation_models['offset'][0].model_result
(array([ 1639.0867 , 1639.0867 , 1639.0867 , 1639.0867 ,
31356.39897573, 31356.39897573, 31356.39897573, 31356.39897573]),
array([ 3.39564863e-02, -1.98083279e+01, -3.82432449e+01, -5.82808309e+01,
0.00000000e+00, 0.00000000e+00, 0.00000000e+00, 0.00000000e+00]),
3)
drift.transformation_models['offset'][1].type
'linear'
drift.transformation_models['offset'][1].model_result
Fit Result
Model: Model(linear)
| fitting method | leastsq |
| # function evals | 4 |
| # data points | 10 |
| # variables | 2 |
| chi-square | 4.12093939 |
| reduced chi-square | 0.51511742 |
| Akaike info crit. | -4.86503948 |
| Bayesian info crit. | -4.25986929 |
| R-squared | 0.99539953 |
| name | value | standard error | relative error | initial value | min | max | vary |
|---|---|---|---|---|---|---|---|
| slope | -9.9028e-04 | 2.3802e-05 | (2.40%) | -0.0009902831976300475 | -inf | inf | True |
| intercept | 2.61177322 | 0.45590047 | (17.46%) | 2.61177322238034 | -inf | inf | True |
| Parameter1 | Parameter 2 | Correlation |
|---|---|---|
| slope | intercept | -0.8673 |
Drift correction¶
The estimated drift is corrected by applying a transformation on the localization chunks (from_model=False).
%%time
drift.apply_correction(from_model=False);
CPU times: user 279 ms, sys: 6.07 ms, total: 285 ms
Wall time: 284 ms
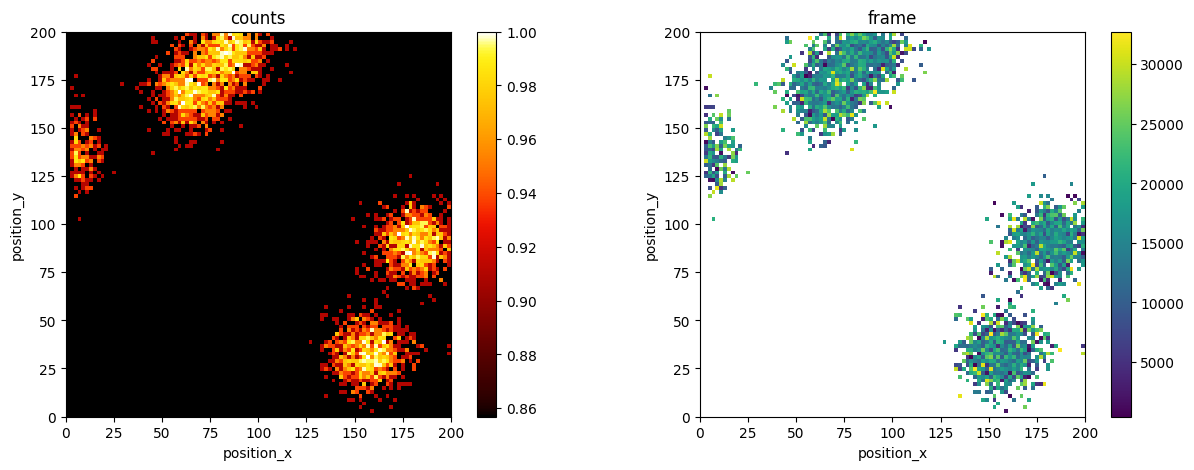
The same correction can be applied to any other localization dataset.
fig, axes = plt.subplots(1, 2, figsize=(15, 5))
lc.render_2d(drift.locdata_corrected, ax=axes[0], bin_size=2, rescale='equal', bin_range=((0, 200),(0, 200)));
lc.render_2d_mpl(drift.locdata_corrected, ax=axes[1], other_property='frame', bin_size=2, bin_range=((0, 200),(0, 200)), cmap='viridis');
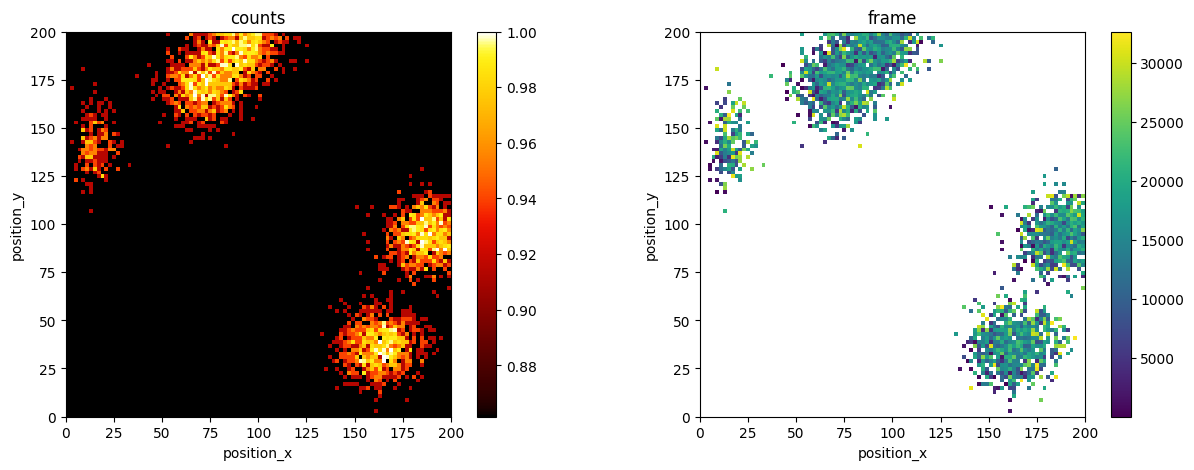
rmse(dat_blob, drift.locdata_corrected).round(2)
array([9.55, 4.82])
Or the estimated drift is corrected by applying a transformation on each individual localization using the drift models (from_model=True).
%%time
drift.apply_correction(from_model=True)
CPU times: user 45.4 ms, sys: 3.95 ms, total: 49.3 ms
Wall time: 49.1 ms
Drift(chunks=None, chunk_size=10000, n_chunks=None, target=first, method=icp, kwargs_chunk=None, kwargs_register=None)
fig, axes = plt.subplots(1, 2, figsize=(15, 5))
lc.render_2d(drift.locdata_corrected, ax=axes[0], bin_size=2, rescale='equal', bin_range=((0, 200),(0, 200)));
lc.render_2d_mpl(drift.locdata_corrected, ax=axes[1], other_property='frame', bin_size=2, bin_range=((0, 200),(0, 200)), cmap='viridis');
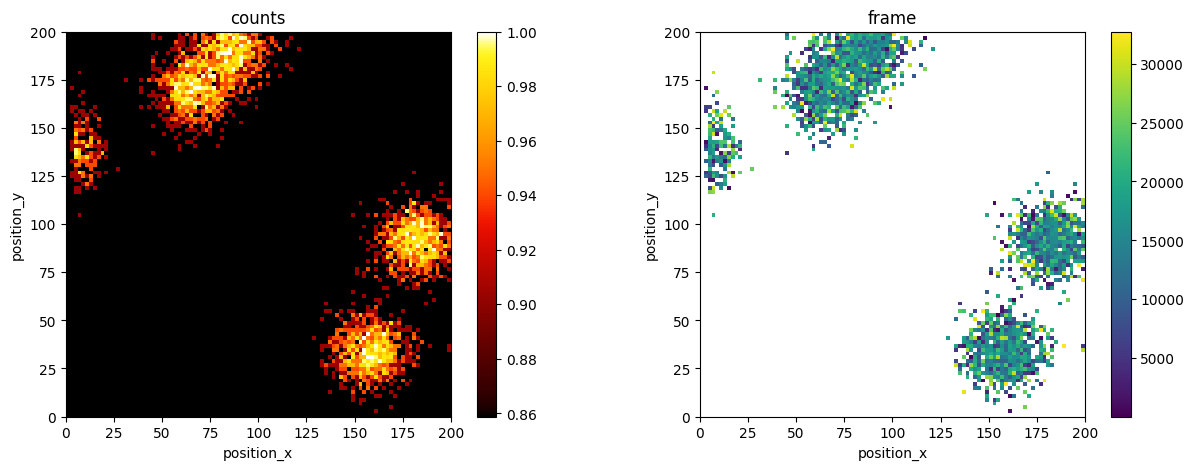
rmse(dat_blob, drift.locdata_corrected).round(2)
array([3.93, 2.77])
drift.locdata_corrected.meta
identifier: "26"
source: DESIGN
state: MODIFIED
history {
name: "LocData.from_dataframe"
}
history {
name: "add_drift"
parameter: "{\'locdata\': <locan.data.locdata.LocData object at 0x7cdb297a8d10>, \'diffusion_constant\': None, \'velocity\': (0.002, 0.001), \'seed\': Generator(PCG64) at 0x7CDB337B35A0}"
}
history {
name: "apply_correction"
parameter: "{\'self\': Drift(chunks=None, chunk_size=10000, n_chunks=None, target=first, method=icp, kwargs_chunk=None, kwargs_register=None), \'locdata\': None, \'from_model\': True}"
}
ancestor_identifiers: "2"
ancestor_identifiers: "3"
element_count: 98201
frame_count: 31016
creation_time {
seconds: 1777538002
nanos: 672057000
}
modification_time {
seconds: 1777538007
nanos: 141515000
}
Drift analysis by a cross-correlation algorithm¶
The same kind of drift estimation and correction can be applied using the image cross-correlation algorithm.
%%time
drift = lc.Drift(chunk_size=10_000, target='first', method='cc').\
compute(dat_blob_with_drift).\
fit_transformations(slice_data=slice(None), offset_models=(LinearModel(), LinearModel()), verbose=True).\
apply_correction(from_model=True);
/home/docs/checkouts/readthedocs.org/user_builds/locan/envs/latest/lib/python3.11/site-packages/locan/analysis/drift.py:265: UserWarning: The function register_cc has been refactored. The kwargs max_offset and verbose are deprecated . It now calls _register_cc_skimage. Use _register_cc_picasso for legacy behavior.
transformation = register_cc(
/home/docs/checkouts/readthedocs.org/user_builds/locan/envs/latest/lib/python3.11/site-packages/locan/analysis/drift.py:265: UserWarning: The function register_cc has been refactored. The kwargs max_offset and verbose are deprecated . It now calls _register_cc_skimage. Use _register_cc_picasso for legacy behavior.
transformation = register_cc(
/home/docs/checkouts/readthedocs.org/user_builds/locan/envs/latest/lib/python3.11/site-packages/locan/analysis/drift.py:265: UserWarning: The function register_cc has been refactored. The kwargs max_offset and verbose are deprecated . It now calls _register_cc_skimage. Use _register_cc_picasso for legacy behavior.
transformation = register_cc(
/home/docs/checkouts/readthedocs.org/user_builds/locan/envs/latest/lib/python3.11/site-packages/locan/analysis/drift.py:265: UserWarning: The function register_cc has been refactored. The kwargs max_offset and verbose are deprecated . It now calls _register_cc_skimage. Use _register_cc_picasso for legacy behavior.
transformation = register_cc(
/home/docs/checkouts/readthedocs.org/user_builds/locan/envs/latest/lib/python3.11/site-packages/locan/analysis/drift.py:265: UserWarning: The function register_cc has been refactored. The kwargs max_offset and verbose are deprecated . It now calls _register_cc_skimage. Use _register_cc_picasso for legacy behavior.
transformation = register_cc(
/home/docs/checkouts/readthedocs.org/user_builds/locan/envs/latest/lib/python3.11/site-packages/locan/analysis/drift.py:265: UserWarning: The function register_cc has been refactored. The kwargs max_offset and verbose are deprecated . It now calls _register_cc_skimage. Use _register_cc_picasso for legacy behavior.
transformation = register_cc(
/home/docs/checkouts/readthedocs.org/user_builds/locan/envs/latest/lib/python3.11/site-packages/locan/analysis/drift.py:265: UserWarning: The function register_cc has been refactored. The kwargs max_offset and verbose are deprecated . It now calls _register_cc_skimage. Use _register_cc_picasso for legacy behavior.
transformation = register_cc(
/home/docs/checkouts/readthedocs.org/user_builds/locan/envs/latest/lib/python3.11/site-packages/locan/analysis/drift.py:265: UserWarning: The function register_cc has been refactored. The kwargs max_offset and verbose are deprecated . It now calls _register_cc_skimage. Use _register_cc_picasso for legacy behavior.
transformation = register_cc(
/home/docs/checkouts/readthedocs.org/user_builds/locan/envs/latest/lib/python3.11/site-packages/locan/analysis/drift.py:265: UserWarning: The function register_cc has been refactored. The kwargs max_offset and verbose are deprecated . It now calls _register_cc_skimage. Use _register_cc_picasso for legacy behavior.
transformation = register_cc(
CPU times: user 451 ms, sys: 9.02 ms, total: 461 ms
Wall time: 460 ms
fig, axes = plt.subplots(1, 2, figsize=(15, 5))
lc.render_2d(drift.locdata_corrected, ax=axes[0], bin_size=2, rescale='equal', bin_range=((0, 200),(0, 200)));
lc.render_2d_mpl(drift.locdata_corrected, ax=axes[1], other_property='frame', bin_size=2, bin_range=((0, 200),(0, 200)), cmap='viridis');
rmse(dat_blob, drift.locdata_corrected)
array([3.22658567, 1.66731276])