Tutorial about clustering localizations data¶
Locan provides methods for clustering localizations in LocData objects. The methods all return a new LocDat object that represents the collected selections for each cluster.
from pathlib import Path
%matplotlib inline
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import locan as lc
lc.show_versions(system=False, dependencies=False, verbose=False)
Locan:
version: 0.22.0.dev32+g4bfc3ab8b
Python:
version: 3.11.14
Synthetic data¶
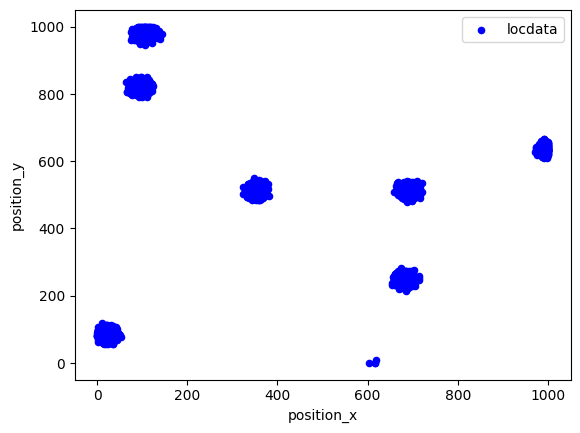
We simulate localization data that follows a Neyman-Scott distribution in 2D:
rng = np.random.default_rng(seed=11)
locdata = lc.simulate_Thomas(parent_intensity=1e-5, region=((0, 1000), (0, 1000)), cluster_mu=1000, cluster_std=10, seed=rng)
locdata.print_summary()
Jupyter environment detected. Enabling Open3D WebVisualizer.
[Open3D INFO] WebRTC GUI backend enabled.
[Open3D INFO] WebRTCWindowSystem: HTTP handshake server disabled.
identifier: "1"
comment: ""
source: SIMULATION
state: RAW
element_count: 6409
frame_count: 0
creation_time {
2026-04-30T08:36:04.064730Z
}
fig, ax = plt.subplots(nrows=1, ncols=1)
locdata.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Blue', label='locdata')
plt.show()
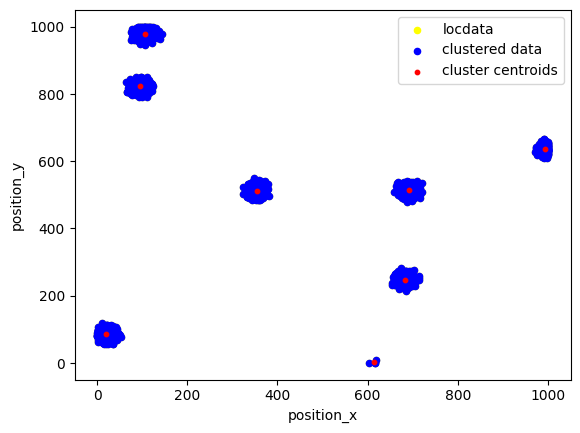
Cluster localizations by dbscan¶
noise, clust = lc.cluster_dbscan(locdata, eps=20, min_samples=3)
assert noise.data.empty
fig, ax = plt.subplots(nrows=1, ncols=1)
locdata.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Yellow', label='locdata')
lc.LocData.concat(clust.references).data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Blue', label='clustered data')
clust.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Red', s=10, label='cluster centroids')
plt.show()
clust.data.head()
| localization_count | position_x | uncertainty_x | position_y | uncertainty_y | region_measure_bb | localization_density_bb | subregion_measure_bb | region_measure | localization_density | subregion_measure | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1016 | 20.379759 | 0.300643 | 85.374381 | 0.314089 | 3262.794976 | 0.311389 | 229.091796 | 1000000 | 0.001016 | 4000 |
| 1 | 1050 | 681.909709 | 0.305784 | 248.276785 | 0.310572 | 4122.205751 | 0.254718 | 257.346576 | 1000000 | 0.001050 | 4000 |
| 2 | 986 | 353.614004 | 0.302981 | 512.621728 | 0.320747 | 3814.439353 | 0.258491 | 248.125971 | 1000000 | 0.000986 | 4000 |
| 3 | 996 | 690.951712 | 0.315008 | 513.619337 | 0.313548 | 3935.485208 | 0.253082 | 250.933843 | 1000000 | 0.000996 | 4000 |
| 4 | 368 | 992.523811 | 0.288485 | 636.239028 | 0.548494 | 1650.773324 | 0.222926 | 170.375014 | 1000000 | 0.000368 | 4000 |
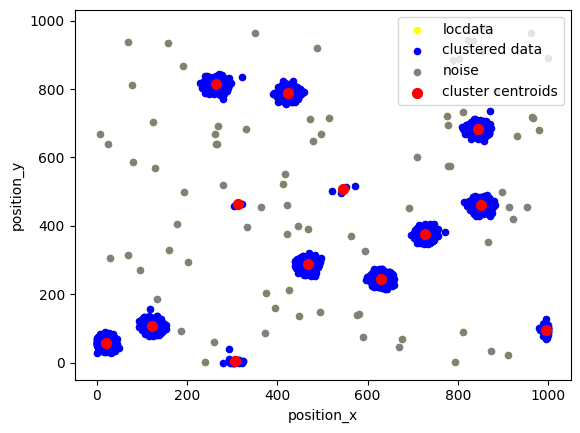
Cluster localizations in the presence of noise¶
Often homogeneously distributed localizations are present that cannot be clustered (so-called noise). In this case noise should be set True such that two LocData objects are returned that hold noise and the cluster collection. If noise is False it will be part of the returned cluster collection.
locdata_cluster = lc.simulate_Thomas(parent_intensity=1e-5, region=((0, 1000), (0, 1000)), cluster_mu=1000, cluster_std=10, seed=rng)
locdata_noise = lc.simulate_Poisson(intensity=1e-4, region=((0, 1000), (0, 1000)), seed=rng)
locdata = lc.LocData.concat([locdata_cluster, locdata_noise])
noise, clust = lc.cluster_dbscan(locdata, eps=30, min_samples=3)
fig, ax = plt.subplots(nrows=1, ncols=1)
locdata.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Yellow', label='locdata')
lc.LocData.concat(clust.references).data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Blue', label='clustered data')
noise.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Gray', label='noise')
clust.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Red', s=50, label='cluster centroids')
plt.show()
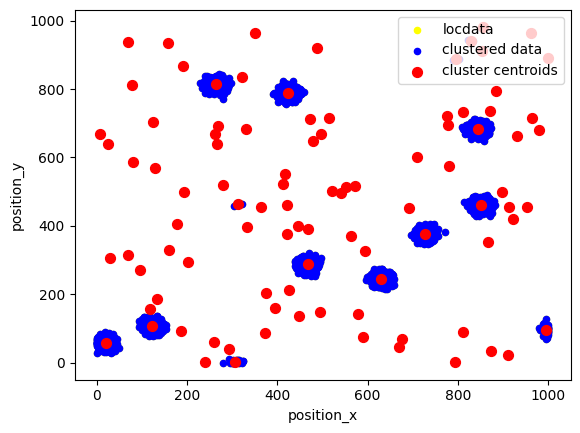
If single localizations should be inlcuded as individual clusters, we need to reduce min_samples to 1. In that case noise will always be None.
noise, clust = lc.cluster_dbscan(locdata, eps=20, min_samples=1)
assert noise.data.empty
fig, ax = plt.subplots(nrows=1, ncols=1)
locdata.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Yellow', label='locdata')
lc.LocData.concat(clust.references).data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Blue', label='clustered data')
# noise.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Gray', label='noise')
clust.data.plot.scatter(x='position_x', y='position_y', ax=ax, color='Red', s=50, label='cluster centroids')
plt.show()
Other cluster functions are available in the locan.data.clustermodule.