Tutorial about localizations per frame¶
from pathlib import Path
%matplotlib inline
import matplotlib.pyplot as plt
import locan as lc
lc.show_versions(system=False, dependencies=False, verbose=False)
Locan:
version: 0.22.0.dev32+g4bfc3ab8b
Python:
version: 3.11.14
# A path in which test data can be found:
TEST_DIR: Path = Path.cwd().parents[2] / "tests"
TEST_DIR
PosixPath('/home/docs/checkouts/readthedocs.org/user_builds/locan/checkouts/latest/tests')
Load rapidSTORM data file¶
Identify some data in the test_data directory and provide a path using pathlib.Path
Or get data with more localizations:
dat = lc.load_tubulin()
Jupyter environment detected. Enabling Open3D WebVisualizer.
[Open3D INFO] WebRTC GUI backend enabled.
[Open3D INFO] WebRTCWindowSystem: HTTP handshake server disabled.
Print information about the data:
print(dat.data.head(), '\n')
print('Summary:')
dat.print_summary()
print('Properties:')
print(dat.properties)
position_x position_y frame intensity chi_square \
0 9937.400391 16751.300781 0 40501.601562 3744920.0
1 9998.709961 12022.799805 0 36280.300781 14295400.0
2 9566.769531 8078.229980 0 29984.000000 12302200.0
3 15492.500000 10120.400391 0 38488.300781 3219820.0
4 6381.459961 16057.700195 0 37093.300781 1620450.0
local_background
0 709.413025
1 800.455017
2 890.807007
3 495.067993
4 476.035004
Summary:
identifier: "7"
comment: ""
source: EXPERIMENT
state: RAW
element_count: 1506568
frame_count: 74969
file {
type: ASDF
path: "/home/docs/LocanDatasets/tubulin_cos7.asdf"
}
creation_time {
2026-04-30T08:35:13.543245Z
}
Properties:
{'localization_count': 1506568, 'position_x': np.float64(8833.605738466662), 'uncertainty_x': np.float64(4.053253266247036), 'position_y': np.float64(10446.826432598386), 'uncertainty_y': np.float64(3.278383909327508), 'intensity': np.float32(19965508000.0), 'local_background': np.float32(284.22076), 'frame': np.int32(0), 'region_measure_bb': np.float32(289612320.0), 'localization_density_bb': np.float32(0.0052020163), 'subregion_measure_bb': np.float32(68072.0)}
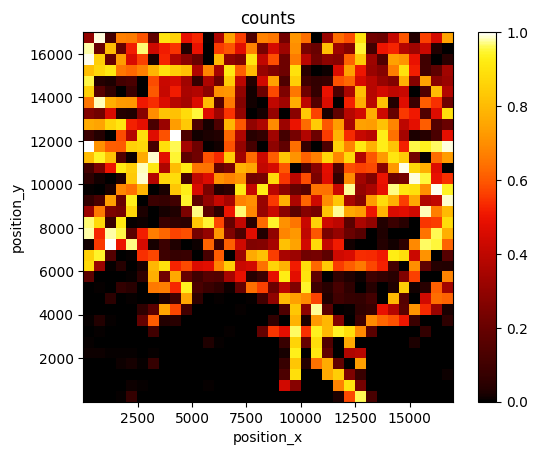
Visualization¶
lc.render_2d(dat, bin_size=500, rescale=lc.Trafo.EQUALIZE_0P3);
Analyze localizations per frame¶
We have a look at the number of localizations that were detected in each frame.
The analysis class Localizations_per_frame provides numerical results, a plot of results versus frame, and a density graph (histogram).
lpf = lc.LocalizationsPerFrame()
lpf.compute(dat)
LocalizationsPerFrame(norm=None, time_delta=integration_time, resample=None)
lpf.results
<locan.analysis.localizations_per_frame._Results at 0x76bf1e332a50>
print(lpf.results.time_series.head())
frame
0 76.0
1 72.0
2 71.0
3 68.0
4 71.0
Name: n_localizations, dtype: float64
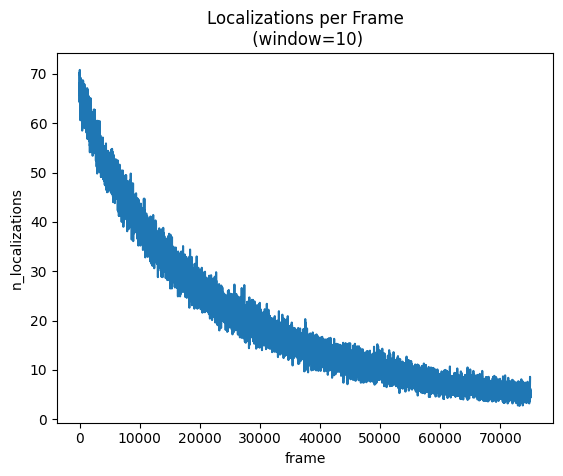
The plot shows results smoothed by a running average according to the specified window.
lpf.plot(window=10);
The histogram per default provides automatic bins, is normalized to show a probability density function and estimates a normal distribution.
lpf.hist();
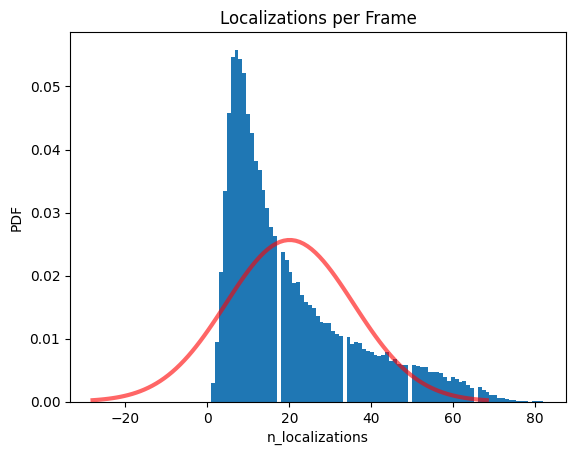
The accumulation time is the time at which fraction of the cumulative intensity is reached.
lpf.results.accumulation_time()
np.int64(17078)
Plot normalized values¶
We can normalize the number of localizations to any other LocData property.
dat.properties
{'localization_count': 1506568,
'position_x': np.float64(8833.605738466662),
'uncertainty_x': np.float64(4.053253266247036),
'position_y': np.float64(10446.826432598386),
'uncertainty_y': np.float64(3.278383909327508),
'intensity': np.float32(19965508000.0),
'local_background': np.float32(284.22076),
'frame': np.int32(0),
'region_measure_bb': np.float32(289612320.0),
'localization_density_bb': np.float32(0.0052020163),
'subregion_measure_bb': np.float32(68072.0)}
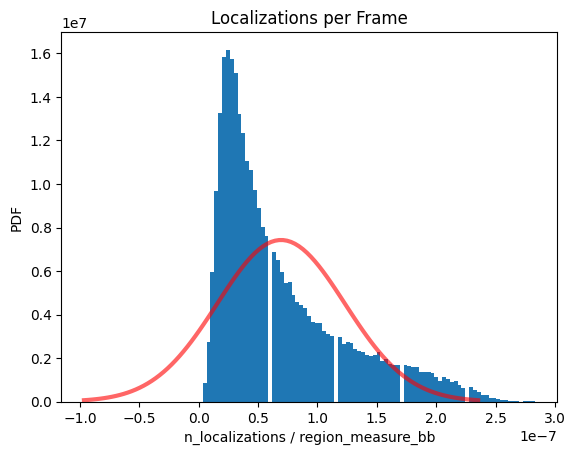
lpf = lc.LocalizationsPerFrame(norm='region_measure_bb').compute(dat)
lpf.hist();